Повышение достоверности измерений загрязняющих веществ, содержащихся в дымовых газах
Повышение точности измерений загрязняющих веществ, содержащихся в дымовых газах, является актуальной задачей для промышленных предприятий, так как от этого зависит соблюдение норм ПДК, установленных законодательством. Как показывают исследования, из-за неравномерности потока дымового газа в трубе точность измерений может быть неудовлетворительной [1]. Выбор более точного газоанализатора не решает проблемы неравномерности потока при измерении в одной точке сечения трубы. Повышает точность измерений забор пробы газа в нескольких точках диаметральной плоскости трубы с последующим усреднением результата измерений в этих точках либо использования значения максимальной концентрации, что должно определяться нормативно-правовыми документами. Технической сложностью измерений в нескольких точках является необходимость перемещения газозаборного зонда на высоте от 5 диаметров трубы. Например, при диаметре трубы 3 метра оператору необходим газозаборный зонд длиной не менее 2,5 метра и работа с ним на высоте 15 метров. Очевидно, что такая операция достаточно неудобна и требует некоторой автоматизации, позволяющей перемещать газозаборный зонд с уровня земли. Некоторые вопросы технического решения рассмотрены в [2]. ООО «Природоохранные и энергосберегающие технологии» так же осуществляет поиск технического решения вышеуказанной задачи. Приоритетом является полный автоматизированный контроль перемещения зонда и выполнения измерений в точках контроля. На сегодняшний день создан прототип устройства для перемещения зонда на базе контроллера Arduino UNO. Контроллер дает возможность гибкого программирования под поставленную измерительную задачу и позволяет управлять устройствами, в т.ч. газоанализаторами посредством Modbus RS-485. Прототип устройства оснащен шаговым двигателем, который через ременной привод осуществляет перемещение металлического троса и прикрепленного к нему зонда на заданную длину в прямом и обратном направлении. Мощности шагового двигателя хватает для перемещения груза массой не менее 2 кг. При проектировании прототипа учитывались следующие важные моменты:
- шаговый двигатель и механическая часть привода располагаются в месте консольного крепления направляющей зонда на установленной высоте трубы (например, 15 м);
- контроллер шагового двигателя, блок питания, световая индикация и кнопка управления запуском располагаются на уровне земли; - для обеспечения запуска зонда из строго фиксированной позиции в начальной точке измерений, реализована «парковка» через конечный выключатель. Также «парковка» позволяет вернуть зонд в начальную точку измерений в случае сбоя в питании;
- проектом предусмотрено (но пока не реализовано) слежение за перемещением ведущего шкива привода на случай обрыва привода шагового двигателя или поломки самого шагового двигателя, что должно соответствующим образом индицироваться оператору на земле. Так же предусмотрено механическое компенсирующее натяжение троса с газоотборным зондом.
Внешний вид прототипа:
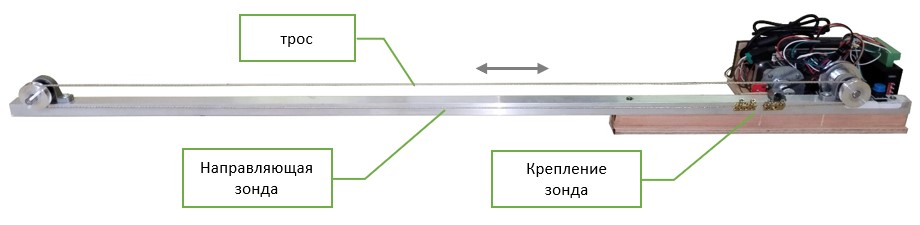
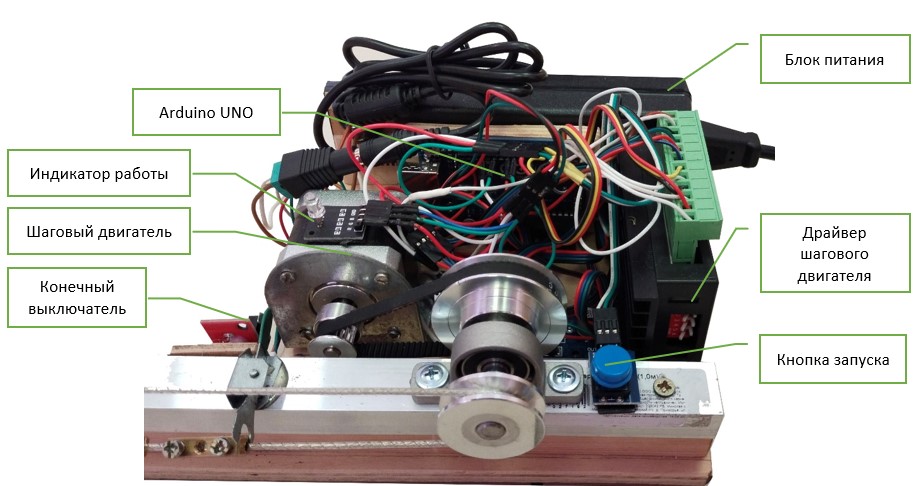
Привод и автоматика (160 мм х 160 мм х 100 мм):
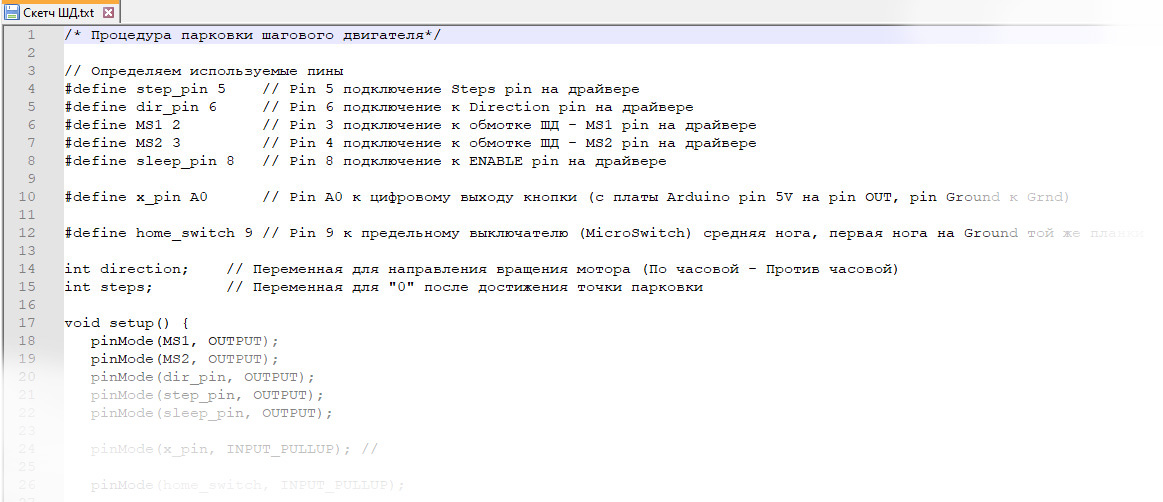
Микропрограмма для Arduino:
Дальнейшие работы предусматривают:
- доработку критических функций автоматики и их индикации;
- пространственное разделение управляющей автоматики и привода с учетом параметров объекта для установки прототипа;
- изготовление направляющей зонда нужной длины для работы в реальных температурных условиях (до 600 0C) и др.;
- тестирование прототипа на реальном объекте.
[1] ТЕПЛОЭНЕРГЕТИКА, 2022, № 1, с. 68- 77, Обеспечение достоверного непрерывного инструментального контроля выбросов маркерных загрязняющих веществ ТЭС в атмосферу / П.В. Росляков, О.Е. Кондратьева, И.Л. Ионкин, Л.Е. Егорова, Национальный исследовательский университет "Московский энергетический институт", Красноказарменная ул., д. 14, Москва, 111250 Россия
[2] ЭКОЛОГИЯ НА ПРЕДПРИЯТИИ № 7 (145), Июль 2023, В.И. Емельянчиков, кандидат технических наук, Ю.Ю. Елисеенко, инженер по качеству